1. 소개
이 제품은 4.8-46V, 2A 듀얼 모터 제어 모듈입니다. 이 모듈은 방열판이 달려 큰 소모 전류를 견딜 수 있습니다.
그것은 LGS의 우수한 고전력 모터 드라이버 칩, L298N을 사용하여 제어가 용이하다.
이 칩은 두 개의 양방향 DC 모터를 직접 구동이 가능하고, 보호를 위해 고속의 쇼트다이오드를 포함한다.
모터 출력 당 최대 2A의 전류으로 구동한다. 드라이버는 와이어 저항을 감소시키기 위해 다양한 브러쉬 디자인을 이용한다.
2. 사양
◆ 제어부분의 입력 전압 : 6 ~ 12V
◆ 구동부분의 입력 전압 Vs : 4.8 ~ 46V
◆ 제어부분의 동작 전류 Iss : 36mA
◆ 구동부분의 동작 전류 Io : 2A
◆ 최대 소비 전력 : 25W (T = 섭씨 75도)
◆ 제어 신호 입력 레벨
High level : 2.3V = Vin = Vss
Low level : -0.3V = Vin = 1.5V
◆ 작동 온도 : (섭씨) -25도 ~ +130도
◆ 구동 방식 : 이중 고출력 H 브리지 드라이버
◆ 모듈 크기 : 53mm x 47mm
◆ 모듈 무게 : 대략 34g
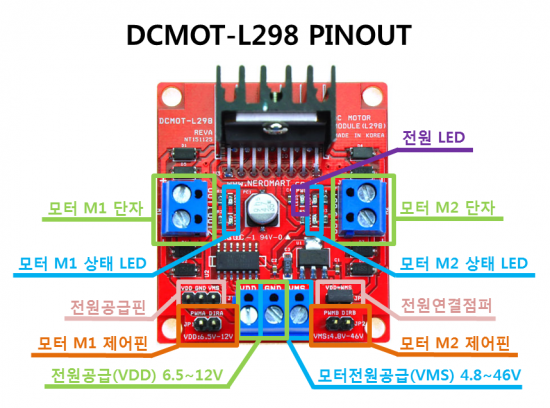
3. 핀아웃(Pin Out)
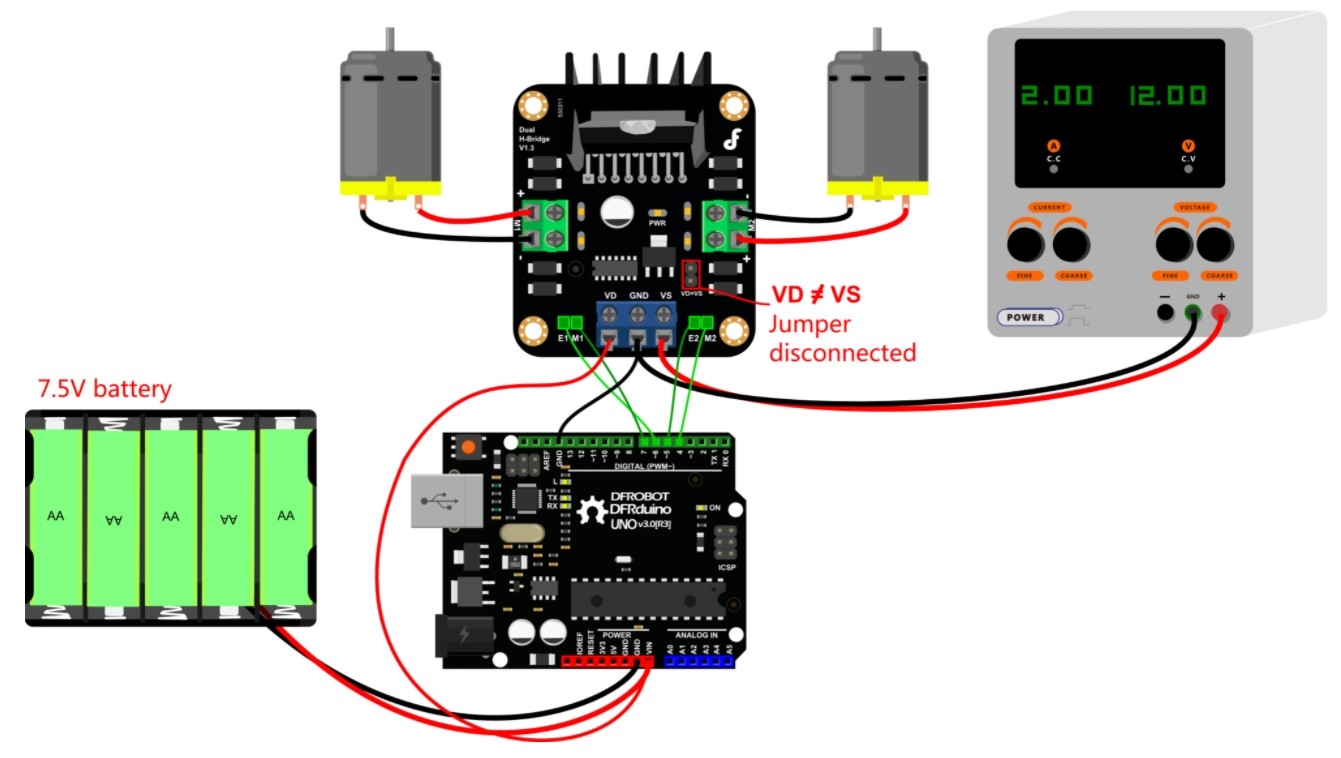
4. 연결도(Connection Diagram)
모터 제어 핀(Motor Control Pins)
PWMA, PWMB : 모터 선택 핀(PWM Control)
DIRA, DIRB : 모터 방향 핀. 예: DIRA = 0, 모터는 정방향으로 회전. DIRA = 1, 역방향으로 회전.
PWMA (E) | DIRA (M) | Run |
LOW | LOW/HIGH | 정지(STOP) |
HIGH | HIGH | 역방향(Back Direction) |
HIGH | LOW | 정방향(Forward Direction) |
PWM | LOW/HIGH | 속도(Speed) |
5. 관련 문서 링크(Link Documents)
◆ Schematic(DCMOT-L298 REVA 버전회로도)
6. 샘플코드(Sample Code) - 아두이노 코드
// # Description:
// # The sketch for using the motor driver L298N
// # Run with the PWM mode
// # Connection:
// # M1 pin -> Digital pin 4
// # E1 pin -> Digital pin 5
// # M2 pin -> Digital pin 7
// # E2 pin -> Digital pin 6
// # Motor Power Supply -> Centor blue screw connector(5.08mm 3p connector)
// # Motor A -> Screw terminal close to E1 driver pin
// # Motor B -> Screw terminal close to E2 driver pin
// #
// # Note: You should connect the GND pin from the DF-MD v1.3 to your MCU controller. They should share the GND pins.
// #
int E1 = 6;
int M1 = 7;
int E2 = 5;
int M2 = 4;
void setup()
{
pinMode(M1, OUTPUT);
pinMode(M2, OUTPUT);
}
void loop()
{
int value;
for(value = 0 ; value <= 255; value+=5)
{
digitalWrite(M1,HIGH);
digitalWrite(M2,HIGH);
analogWrite(E1, value); //PWM Speed Control
analogWrite(E2, value); //PWM Speed Control
delay(30);
}
}